Base class for representing projectors.
More...
#include <Inventor/projectors/SbProjector.h>
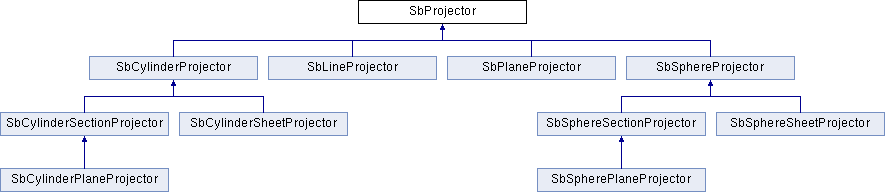
SbProjector is the base class for all projector classes. Projector classes are used to convert from window space (usually based on the mouse location) into a 3D point. This is done by projecting the window coordinate as a 3D vector onto a geometric function in 3-space, and computing the intersection point. Most projectors actually compute incremental changes and produce incremental rotations and translation as needed. Projectors are used to write 3D interactive manipulators and viewers.
- See Also
- SbCylinderProjector, SbCylinderPlaneProjector, SbCylinderSectionProjector, SbCylinderSheetProjector, SbLineProjector, SbPlaneProjector, SbSpherePlaneProjector, SbSphereProjector, SbSphereSectionProjector, SbSphereSheetProjector
Definition at line 86 of file SbProjector.h.
◆ SbProjector()
| SbProjector::SbProjector |
( |
| ) |
|
|
protected |
The default view volume is undefined. The default working space is identity (world space).
◆ ~SbProjector()
| virtual SbProjector::~SbProjector |
( |
| ) |
|
|
inlineprotectedvirtual |
◆ copy()
◆ getViewVolume()
◆ getWorkingLine()
| SbLine SbProjector::getWorkingLine |
( |
const SbVec2f & |
point | ) |
const |
|
protected |
◆ getWorkingSpace()
| const SbMatrix & SbProjector::getWorkingSpace |
( |
| ) |
const |
|
inline |
◆ project()
The point should be normalized (lie in the range [0.0,1.0]), with (0,0) at the lower-left.
Implemented in SbCylinderPlaneProjector, SbCylinderSectionProjector, SbCylinderSheetProjector, SbLineProjector, SbPlaneProjector, SbSpherePlaneProjector, SbSphereSectionProjector, SbSphereSheetProjector, SbCylinderProjector, and SbSphereProjector.
Referenced by SbLineProjector::setStartPosition(), and SbPlaneProjector::setStartPosition().
◆ setViewVolume()
| virtual void SbProjector::setViewVolume |
( |
const SbViewVolume & |
vol | ) |
|
|
virtual |
◆ setWorkingSpace()
| virtual void SbProjector::setWorkingSpace |
( |
const SbMatrix & |
space | ) |
|
|
virtual |
This matrix should transform working space coordinates into world space. The default matrix is identity, meaning that the default working space is world space.
Reimplemented in SbCylinderProjector, and SbSphereProjector.
◆ viewVol
◆ workingToWorld
◆ worldToWorking
The documentation for this class was generated from the following file:
- /home/jenkins/workspaces/mevislab/4.2_0/build/MeVis/ThirdParty/Sources/Inventor/include/Inventor/projectors/SbProjector.h