|
| | SoDataSensor () |
| | Constructors. The second form takes standard callback function and data.
|
| |
| | SoDataSensor (SoSensorCB *func, void *data) |
| |
| virtual | ~SoDataSensor () |
| | Destructor.
|
| |
| void | setDeleteCallback (SoSensorCB *f, void *data=NULL) |
| | Sets a callback that will be called when the object the sensor is sensing is deleted.
|
| |
| SoNode * | getTriggerNode () const |
| | If this is a priority 0 data sensor, returns the node/field that was modified that caused this sensor to trigger.
|
| |
| SoField * | getTriggerField () const |
| | Like getTriggerNode(), but returns the field that started notification (NULL if the sensor isn't priority 0 or if notification didn't start at a field).
|
| |
| SoPath * | getTriggerPath () const |
| | Returns the path from the node to which this sensor is attached down to the child node that changed.
|
| |
| void | setTriggerPathFlag (bool flag) |
| |
| bool | getTriggerPathFlag () const |
| |
| virtual void | unschedule () |
| | Override unschedule() to reset trigNode and trigPath.
|
| |
| virtual void | trigger () |
| | Override trigger to reset trigNode and trigPath, if necessary.
|
| |
| virtual void | notify (SoNotList *list) |
| | Propagates modification notification through an instance.
|
| |
| virtual void | dyingReference ()=0 |
| | This is called when the base (path, field, node, whatever) is deleted.
|
| |
| | SoDelayQueueSensor () |
| | Constructors. The second form takes standard callback function and data.
|
| |
| | SoDelayQueueSensor (SoSensorCB *func, void *data) |
| |
| virtual | ~SoDelayQueueSensor () |
| | Destructor.
|
| |
| void | setPriority (uint32_t pri) |
| | Sets the priority of the sensor.
|
| |
| uint32_t | getPriority () const |
| | Gets the priority of the sensor.
|
| |
| virtual void | schedule () |
| | If this sensor's priority is non-zero, adds this sensor to the list of delay queue sensors ready to be triggered.
|
| |
| virtual bool | isScheduled () const |
| | Returns TRUE if this sensor has been scheduled and is waiting in the delay queue to be triggered.
|
| |
| virtual bool | isIdleOnly () const |
| | This method is overridden by IdleSensors to tell sensor manager that they should only be processed when there really is idle time (and not when the delay queue timeout expires).
|
| |
| void | setCounter (uint32_t c) |
| | Set/inquire counter when sensor was last triggered.
|
| |
| uint32_t | getCounter () const |
| |
| | SoSensor () |
| | Constructors. The second form takes callback function and data.
|
| |
| | SoSensor (SoSensorCB *f, void *d) |
| |
| virtual | ~SoSensor () |
| | Virtual destructor so that subclasses are deleted properly.
|
| |
| void | setFunction (SoSensorCB *f) |
| | Sets the callback function that is called when the sensor is triggered.
|
| |
| void | setData (void *d) |
| | Sets the callback data passed to the callback function.
|
| |
| SoSensorCB * | getFunction () const |
| | Returns the callback function that will be called when the sensor is triggered.
|
| |
| void * | getData () const |
| | Returns the user-supplied pointer that will be passed to the callback function.
|
| |
| void | setNextInQueue (SoSensor *next) |
| | Sets/returns the next sensor in whichever queue the sensor is in.
|
| |
| SoSensor * | getNextInQueue () const |
| |
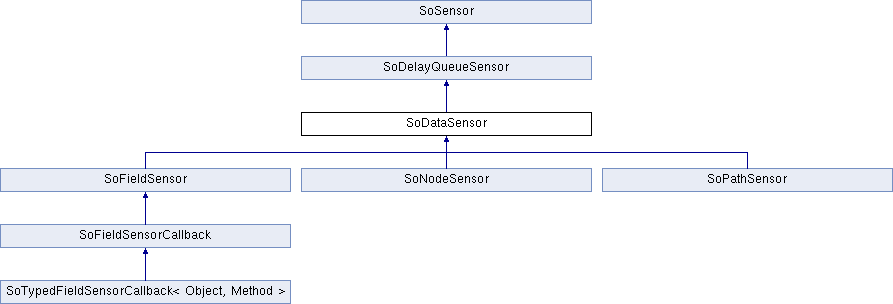
Data sensors detect changes to scene graph objects (paths, nodes, or fields) and trigger their callback function when the object changes.
Data sensors provide a delete callback that is called just before the object the data sensor is attached to is deleted; note that the callback should not attempt to modify the object in any way, or core dumps may result.
Priority zero data sensors also provide methods that can be called in the callback function to determine exactly which node, field, or path caused the sensor to be triggered.
- See Also
- SoNodeSensor, SoPathSensor, SoFieldSensor, SoDelayQueueSensor
Definition at line 93 of file SoDataSensor.h.
 Public Member Functions inherited from SoDelayQueueSensor
Public Member Functions inherited from SoDelayQueueSensor