PCLSampleConsensus¶
Purpose¶
Applies a Sample Consensus Model created in a PCLSampleConsensusModels module to the input point cloud and tries to search the model in it with the any of the approaches referenced in
pcl::MaximumLikelihoodSampleConsensus,
pcl::RandomizedMEstimatorSampleConsensus,
pcl::RandomizedRandomSampleConsensus,
pcl::MEstimatorSampleConsensus,
pcl::LeastMedianSquares,
pcl::ProgressiveSampleConsensus, or
pcl::RandomSampleConsensus.
Tips¶
The Distance Threshold given as std::numeric_limits<double>::max() from the default class instance often does not stable fine. It is recommended to set a much smaller one for successful operations.
Windows¶
Default Panel¶
Input Fields¶
inputPCLObject0¶
- name: inputPCLObject0, type: PCLBaseObject(MLBase)¶
Connect the point cloud in which the model is searched which is retrieved from the connected
PCLSampleConsensusModelsmodule.For accessing this object via scripting, see the Scripting Reference:
MLPCLBaseObjectWrapper.
inputSacMLModule¶
- name: inputSacMLModule, type: PCLSampleConsensusModels(MLBase)¶
Expects the connection of a
PCLSampleConsensusModelsoutput connectorPCLSampleConsensusModels.outputSacMLModuleBaseto this module to provide a creator for Sample Consensus models.
Output Fields¶
outputPCLObject0¶
- name: outputPCLObject0, type: PCLBaseObject(MLBase)¶
The output point cloud will be subset of the input point cloud which matches as good as possible the model created by the connected
PCLSampleConsensusModels, or if the model could not be found it can be empty. If no input point cloud orPCLSampleConsensusModelsare provides then the point cloud can be NULL. Indices of source points (in other words the found inliers) are also provided in the output base object.For accessing this object via scripting, see the Scripting Reference:
MLPCLBaseObjectWrapper.
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
Visible Fields¶
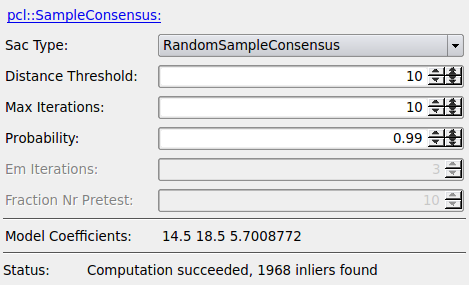
Status¶
- name: status, type: String, persistent: no¶
Shows status information about processing results, or in case of errors, some information about reasons.
see also PCLModule.status
Sac Type¶
- name: sacType, type: Enum, default: RandomSampleConsensus¶
Selects which of the SampleConsensus algorithms is to be used. Note that the mode RandomizedRandomSampleConsensus has been deactivated since it makes calculations hang in too many parameter combinations.
Values:
Title |
Name |
Description |
|---|---|---|
Random Sample Consensus |
RandomSampleConsensus |
Selects the RANSAC (RAndom SAmple Consensus) algorithm. See pcl::RandomSampleConsensus for details. |
Maximum Likelihood Sample Consensus |
MaximumLikelihoodSampleConsensus |
Selects the MLESAC (Maximum Likelihood Estimator SAmple Consensus) algorithm, see pcl::MaximumLikelihoodSampleConsensus for details. |
Randomized MEstimator Sample Consensus |
RandomizedMEstimatorSampleConsensus |
Selects the RMSAC (Randomized M-estimator SAmple Consensus) algorithm, see pcl::RandomizedMEstimatorSampleConsensus for details. |
MEstimator Sample Consensus |
MEstimatorSampleConsensus |
Selects the MSAC (M-estimator SAmple Consensus) algorithm, see pcl::MEstimatorSampleConsensus for details. |
Least Median Sample Consensus |
LeastMedianSampleConsensus |
Selects the LMedS (Least Median of Squares) algorithm, see pcl::LeastMedianSquares for details. |
Progressive Sample Consensus |
ProgressiveSampleConsensus |
Selects the PROSAC (RAndom SAmple Consensus) algorithm, see pcl::ProgressiveSampleConsensus for details. |
Distance Threshold¶
- name: distanceThreshold, type: Double, default: 1.79769313486232e+308¶
The distance to model threshold which must be considered in the model search. The default std::numeric_limits<double>::max() from the default class instance often does not stable fine. It is recommended to set a much smaller one for successful operations.
Max Iterations¶
- name: maxIterations, type: Integer, default: 1000¶
The maximum number of allowed iterations to find a good result.
Probability¶
- name: probability, type: Double, default: 0.99¶
The desired probability of choosing at least one sample free from outliers.
Em Iterations¶
Fraction Nr Pretest¶
Model Coefficients¶
- name: modelCoefficients, type: String, persistent: no¶
The coefficients of the best model; the number and interpretation of coefficients depends on the model type.