PCLSampleConsensusModels¶
Purpose¶
PCLSampleConsensusModels is a wrappers around most Sample Consensus models of the PCL. A model created with this module can be passed to other modules (for example PCLSampleConsensus) which then can try to perform object searches or segmentations in other point clouds.
Note that not all models can be used on all point types and with all parameters. See the documentation of the modules to check for limitations.
See pcl::SampleConsensusModel for the base class of all PCL Sample consensus models.
Windows¶
Default Panel¶
Input Fields¶
inputPCLObject0¶
- name: inputPCLObject0, type: MLBase¶
This input is used if
Model Typeis Registration. The it will be fed into the created pcl::SampleConsensusModelRegistration model instance as target point cloud.
Output Fields¶
outputSacMLModuleBase¶
- name: outputSacMLModuleBase, type: MLBase¶
Passes a pointer to this
PCLSampleConsensusModelsto make it usable by other modules, for example byPCLSampleConsensuswhich has the appropriate inputPCLSampleConsensus.inputSacMLModule. These connected modules then can create models with the help ofPCLSampleConsensusModels. This connector does not provide any (point) indices.
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
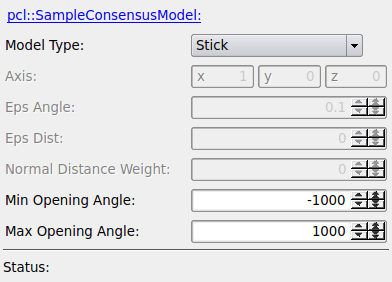
Visible Fields¶
Status¶
- name: status, type: String, persistent: no¶
Unused in this module.
see also PCLModule.status
Eps Angle¶
Eps Dist¶
Normal Distance Weight¶
- name: normalDistanceWeight, type: Double, default: 0¶
The normal angular distance weight needed by some models (Cone, Cylinder, NormalParallelLine, NormalPlane).
Axis¶
Min Opening Angle¶
- name: minOpeningAngle, type: Double, default: -1.79769313486232e+308¶
The
Min Opening Angleis the minimum allowable opening angle, set as parameter in all models.
Max Opening Angle¶
- name: maxOpeningAngle, type: Double, default: 1.79769313486232e+308¶
The
Max Opening Angleis the maximum allowable opening angle, set as parameter in all models.
Model Type¶
- name: modelType, type: Enum, default: Circle¶
The selector for the desired model type to be created when connected modules request one over the
outputSacMLModuleBaseconnector.
Values:
Title |
Name |
Description |
|---|---|---|
Circle |
Circle |
Selects the creation of a 2D circle model. See pcl::SampleConsensusModelCircle2D for details. |
Circle3d |
Circle3d |
Selects the creation of a 3D circle model. See pcl::SampleConsensusModelCircle3D for details. |
Cone |
Cone |
Selects the creation of a cone model. Requires point types with normal fields/members. See pcl::SampleConsensusModelCone for details. |
Cylinder |
Cylinder |
Selects the creation of a cone model. Requires point types with normal fields/members. See pcl::SampleConsensusModelCylinder for details. |
Line |
Line |
Selects the creation of a line model. See pcl::SampleConsensusModelLine for details. |
Normal Parallel Plane |
NormalParallelPlane |
Selects the creation of a normal parallel plane model. Requires point types with normal fields/members. See pcl::SampleConsensusModelNormalParallelPlane for details. |
Normal Plane |
NormalPlane |
Selects the creation of a normal plane model. Requires point types with normal fields/members. See pcl::SampleConsensusModelNormalPlane for details. |
Parallel Line |
ParallelLine |
Selects the creation of a parallel line model. See pcl::SampleConsensusModelParallelLine for details. |
Parallel Plane |
ParallelPlane |
Selects the creation of a parallel plane model. See pcl::SampleConsensusModelParallelPlane for details. |
Perpendicular Plane |
PerpendicularPlane |
Selects the creation of a perpendicular plane model. See pcl::SampleConsensusModelPerpendicularPlane for details. |
Plane |
Plane |
Selects the creation of a plane model. See pcl::SampleConsensusModelPlane for details. |
Registration |
Registration |
Selects the creation of a registration model which takes the input point cloud from |
Sphere |
Sphere |
Selects the creation of a sphere model. See pcl::SampleConsensusModelSphere for details. |
Stick |
Stick |
Selects the creation of a stick model. See pcl::SampleConsensusModelStick for details. |