PCLR2SonicWCLoader¶
Purpose¶
This is a reader for R2Sonic .wc water column files generated by SONIC 2026/2024/2022 devices by R2 Sonic LLC..
It reads magnitude data from such files, applies
a value unification (see
Unify to homogeneous range after TVG) if enableda thresholding (see
Magnitude Threshold)a gain compensation (see
Subtract gain from signal values)a scaling (see
Magnitude Scale)and finally a clamping to [0,65535] and division by 65535 to scale values to [0,1] if not specified otherwise in
Disable value normalization to [0,1].
Possible phase values are shifted and scaled from range [-32768,32767] to [0,1] if not specified otherwise in Disable value normalization to [0,1] and/or in Scale phase to [\-1,1].
Output points are of type XYZINormal which means that each point is a tupel (x, y z, w, nx, ny, nz, nw, intensity):
x / data[0]: the x-component of the point
y / data[1]: the y-component of the point
z / data[2]: the z-component of the point
w / data[3]: the homogeneous scale factor (usually 1)
x / data_n[0]: the x-component of the normal of the point (usually 0)
y / data_n[1]: the y-component of the normal of the point (usually 0)
z / data_n[2]: the z-component of the normal of the point (usually 0)
data_n[3]: the homogeneous scale w-component of the normal of the point (usually 0)
curvature: the curvature value of the point, usually filled with the phase value of the signal if available, otherwise 0)
intensity: the intensity value of the point (filled usually with the magnitude value of the signal)
For very large files a number of settings allow the control of maximum number of generated points, used memory, file sizes and cache memory for speed optimizations.
Thank you to Dr. Yann Marcon from MARUM for providing support, lively discussions, code of a draft reader as well as example data which can be published with this module. It was very useful to implement this module, to develop tests and examples.
Details¶
Loaded R2Sonic .wc water column data can be very large and data structures managed internally can be up to 16 times larger. The module makes use of as much memory as needed to fulfill its operation correctly and assumes that settings are configured appropriately. Thus ensure that the machine is capable to manage the configured amount of data. Some tips to reduce the amount of data:
See and set up
Working Memory Hint In MBytesappropriately.See and set up
Max Allowed File Size In MBytesappropriately.See and set up
Max Num Allowed Pointsappropriately.When importing large data sets it is recommended to start with large
Magnitude Threshold, because this can reduce the amount of data significantly.Display only one swatch and switch interactively with
Index Of First Ping To Outputthrough swaths, this is much faster than displaying all swaths at the same time.If possible then use a powerful graphics card (a data set with 1.4GB can produce up to 340 million points if all signals are shown).
Windows¶
Default Panel¶
Output Fields¶
outputPCLObject0¶
- name: outputPCLObject0, type: MLBase¶
Point cloud output with PCL XYZINormal cartesian points. x,y, and z specify the coordinates of samples, intensity the magnitude value and curvature the phase value (if available, otherwise 0). This module still does not set up any indices in this output base object, which, however, may be added in the future.
outputPCLObject1¶
- name: outputPCLObject1, type: MLBase¶
If
Create point cloud with index coordinates at second outputthen a second point cloud with index coordinates is generated and provided atoutputPCLObject1, otherwise this output connector is left NULL. If enabled then it contains points of type PCL XYZINormal with index coordinate points. x,y, and z specify the index positions of beam, ping, and sample of any sample, intensity the magnitude value and curvature the phase value (if available, otherwise 0). This module still does not set up any indices in this output base object, which, however, may be added in the future.
Parameter Fields¶
Field Index¶
Visible Fields¶
Status¶
- name: status, type: String, persistent: no¶
Shows success state of the recent .wc file operation.
see also PCLModule.status
Full File Path¶
- name: fullFilePath, type: String¶
Full path to the file to be loaded.
Auto Apply¶
- name: autoApply, type: Bool, default: FALSE¶
If checked then the file specified in
Full File Pathis loaded immediately on changes ofFull File Path, otherwiseLoadmust be used instead.
Load¶
- name: load, type: Trigger¶
Sensitive only if
Auto Applyis not checked. Then it can be used to load the file specified inFull File Path.
File IO has succeeded¶
- name: fileIOHasSucceeded, type: Bool, persistent: no¶
Checked after a successful load of the file specified in
Full File Path. If not checked after load then file loading failed. See messages inStatusand in the error output for error analysis.
Max Number Of Packets To Show¶
- name: maxNumberOfPacketsToShow, type: Integer, default: 0, minimum: -1¶
The maximum number of data packets from file
Full File Pathto be dumped as text inFile Dump. -1 dumps all packets, 0 disables packet dumping. Take care with -1 and with large values since large file dumps need a lot of memory and degrade performance. Only sensitive ifShow First Of Each Packet Type Onlyis off, otherwise unused.
Show First Of Each Packet Type Only¶
- name: showFirstOfEachPacketTypeOnly, type: Bool, default: FALSE¶
If checked then only the first of each section type (WCD0, H0, A1, M1 or M2) of the file is shown in
File DumpandMax Number Of Packets To Showis ignored. If off thenMax Number Of Packets To Showcontrols the number of sections to display independent of the section types inside.
Max Number Of Beams To Show¶
- name: maxNumberOfBeamsToShow, type: Integer, default: 0, minimum: -1¶
The maximum number of data beams from each dumped packet from file
Full File Pathto be shown as text inFile Dump. -1 dumps all beams, 0 disables dump of beam data values at all. Take care with -1 and with large values since large file dumps need a lot of memory and degrade performance.
Max Number Of Samples Per Beam To Show¶
- name: maxNumberOfSamplesPerBeamToShow, type: Integer, default: 0, minimum: -1¶
The maximum number of data samples to be shown as text in
File Dumpfor each shown beam. -1 dumps all samples of shown beams, 0 disables dump of samples at all. Take care with -1 and with large values since large file dumps need a lot of memory and degrade performance.
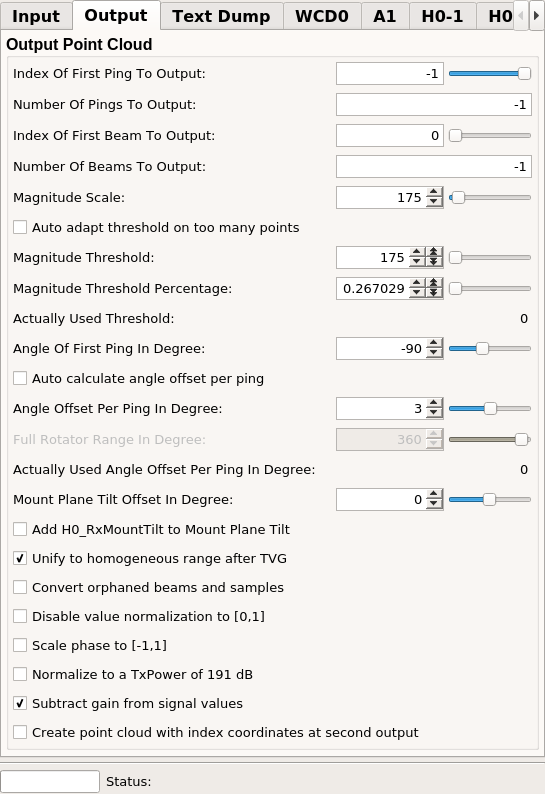
Index Of First Ping To Output¶
- name: indexOfFirstPingToOutput, type: Integer, default: -1, minimum: 0, maximum: -1¶
The output point cloud contains only the beams and samples from pings with indexes [
Index Of First Ping To Output,Index Of First Ping To Output+Number Of Pings To Output-1]. Note that not all ping numbers may be part of the given file and not all pings contain valid beam and/or sample data. IfNumber Of Pings To Outputis -1 then an unlimited number is allowed.
Number Of Pings To Output¶
- name: numberOfPingsToOutput, type: Integer, default: -1, minimum: -1¶
The output point cloud contains only the beams and samples from pings with indexes [
Index Of First Ping To Output,Index Of First Ping To Output+Number Of Pings To Output-1]. Note that not all ping numbers may be part of the given file and not all pings contain beam and/or sample data. IfNumber Of Pings To Outputis -1 then an unlimited number is allowed.
Index Of First Beam To Output¶
- name: indexOfFirstBeamToOutput, type: Integer, default: 0, minimum: 0, maximum: 2048¶
The output point cloud contains only samples of beams with indexes [
Index Of First Beam To Output,Index Of First Beam To Output+Number Of Beams To Output-1]. IfNumber Of Beams To Outputis -1 then an unlimited number is allowed.
Number Of Beams To Output¶
- name: numberOfBeamsToOutput, type: Integer, default: -1, minimum: -1¶
The output point cloud contains only samples of beams with indexes [
Index Of First Beam To Output,Index Of First Beam To Output+Number Of Beams To Output-1]. IfNumber Of Beams To Outputis -1 then an unlimited number is allowed.
Magnitude Scale¶
- name: magnitudeScale, type: Float, default: 175, minimum: 0, maximum: 4096¶
Intensity values of the points in the output point cloud are multiplied with this value before passing them to further processing and finally to the output.
Magnitude Threshold¶
- name: magnitudeThreshold, type: Float, default: 175, minimum: 0, maximum: 65536¶
Each magnitude value found in the file (and possibly compensated with
Unify to homogeneous range after TVG) is compared withMagnitude Threshold: values equal or larger are passed through to further operations, all others are skipped.
Magnitude Threshold Percentage¶
- name: magnitudeThresholdPercentage, type: Float, default: 0.26702881, minimum: 0, maximum: 100¶
Same as
Magnitude Thresholdonly in percent [0,100] of the possible range [0,65536] of signal data.
Actually Used Threshold¶
- name: actuallyUsedThreshold, type: Float, persistent: no¶
Actually Used Thresholdusually will be updated to the value ofMagnitude Thresholdafter loading a file. If, however, the amount of loaded points is larger thanMax Num Allowed PointsandAuto adapt threshold on too many pointsis enabled then the loader internally will use another (automatically determined) threshold which is displayed inActually Used Threshold.
Normalize to a TxPower of 191 dB¶
- name: normalizeTxPowerTo191db, type: Bool, default: FALSE¶
Experimental: If enabled then the decibel TxPower value from file is taken and a relative factor to 191db is calculated, and all signal values from file are rescaled with this value, otherwise the signal values are taken as they are. For example with a TxPower of 191db, all signal values are left as they are, with TxPower = 192db, they are scaled with 1.26, with TxPower = 194db they are scaled with 1/(1.26*1.26*1.26).
Notes:
You may also want to subtract the gain value also documented in this formula. See
Subtract gain from signal valuesfor details. IfUnify to homogeneous range after TVGis enabled then an experimental inverse of the TVG is applied; if disabled the signal data is not modified.Using enabled
Unify to homogeneous range after TVGandNormalize to a TxPower of 191 dBat the same time is not recommended since both try to normalize the signal values with different approaches.
Subtract gain from signal values¶
- name: compensateGain, type: Bool, default: TRUE¶
If enabled then the H0_RxGain value from file member is subtracted from signal values before passing it to the output point cloud intensities, otherwise not.
Auto adapt threshold on too many points¶
- name: autoAdaptThreshold, type: Bool, default: FALSE¶
If the setting of
Magnitude Thresholdcauses that more points than specified inMax Num Allowed Pointswould be created andAuto adapt threshold on too many pointsis on thenPCLR2SonicWCLoaderwill automatically adapt the threshold internally such that the number of points is not exceeded. IfAuto adapt threshold on too many pointsandMax Num Allowed Pointscannot be fulfilled then the file load operation is terminated as described inMax Num Allowed Points.
Unify to homogeneous range after TVG¶
- name: unifyTVGResults, type: Bool, default: TRUE¶
Experimental mode to make signal settings be in the same range after different TVG calculations. If the sonar signal data has been processed with a TVG curve (see “2022-2024-2026 Sonic Operation Manual v6.3r000.pdf”, section 5.8.3 “Time Variable Gain”) or the sonar system itself applies it, the output signal range for each sonar device setting differs. This makes it very difficult to find constant settings for
Magnitude ThresholdandMagnitude Scale- therefore it is desirable to compensate this and to rescale settings into same range after any TVG. Since the TVG is needed the inverse is estimated only for a constant range:antiTVGScale = 1 / (RxRange * ((2.0f*RxAbsorption/1000.f)+log10(RxRange)/RxSpreading))
For details about TVG see “2022-2024-2026 Sonic Operation Manual v6.3r000.pdf”, section 5.8.3 “Time Variable Gain”:
TVG = 2*R* alpha/1000 + Sp*log(R) + G
alpha = Absorption Loss db/km
R = Range in metres
Sp = Spreading loss coefficient
G = Gain from Sonar Control setting
For log a logarithm of 10 is used as calculations are in db, R is the distance of each sample position in euclidean space from the sonar device (and not the H0_RxRange from H0 sections as it may be suggested by the manual). Since log10 becomes negative on values smaller 1 in such cases 0 is used instead.
Notes:
You may also want to subtract the gain value also documented in this formula. See
Subtract gain from signal valuesfor details. IfUnify to homogeneous range after TVGis enabled then an experimental inverse of the TVG is applied; if disabled the signal data is not modified.Using enabled
Unify to homogeneous range after TVGandNormalize to a TxPower of 191 dBat the same time is not recommended since both try to normalize the signal values with different approaches.
Convert Orphaned Beams And Samples¶
- name: convertOrphanedBeamsAndSamples, type: Bool, default: FALSE¶
If enabled then M1 or M2 sections which have no associated H0 or A1 sections are converted to points anyway by using the first found H0/A1 sections of the data set which usually contains the same data as the (probably) lost ones did. Differing parameters are usually not used for conversion, thus the conversion is usually safe. If disabled then such M1/M2 sections are not converted to points.
Disable value normalization to [0,1]¶
- name: disableNormalization, type: Bool, default: FALSE¶
If enabled then original values are passed through: magnitude values then will be in [0,65535] and phase values in [-32768,32767]. Otherwise, if
Disable value normalization to [0,1]is off then magnitude values will be in [0,1] and phase either from [-1,1] or [0,1], dependent onScale phase to [\-1,1].
Scale phase to [-1,1]¶
- name: scalePhaseToMinus1To1, type: Bool, default: FALSE¶
If enabled then phase values are scaled to range [-1, 1], otherwise they are scaled to [0,1]. If
Disable value normalization to [0,1]is on then phase values are not scaled at all and remain in original range [-32768,32767];Scale phase to [\-1,1]is inactive in this case.
Create point cloud with index coordinates at second output¶
- name: createIndexCloud, type: Bool, default: FALSE¶
If enabled then a second point cloud with index coordinates is generated and provided at the second output
outputPCLObject1, otherwise that output connector is left NULL.
File Dump¶
- name: fileDump, type: String, persistent: no¶
A textual dump of file sections to inspect file contents. Since a file dump easily can become memory and time consuming it is limited by the settings
Max Number Of Packets To Show,Max Number Of Beams To Show, andMax Number Of Samples Per Beam To Show.
Max Allowed File Size In MBytes¶
- name: maxAllowedFileSizeInMBytes, type: Integer, default: 250, minimum: -1¶
To avoid out-of resource problems when operating on large R2Sonic .wc water column files, a maximum file size can be specified. All files larges than the limits will be handled as an error, data load is refused and
Statusis set appropriately. -1 allows any file size.
Max Num Allowed Points¶
- name: maxNumAllowedPoints, type: Integer, default: 32000000, minimum: -1¶
To avoid out-of resource problems when operating on large R2Sonic(.wc) files, a maximum number of result points can be specified. Knowing that one point needs around 64 bytes this can help the user to define a maximum number of points which can be handled safely on a system. All settings resulting in more points will be handled as an error, no points are created and
Statusis set appropriately. -1 allows any number of points regardless of available resources.
Working Memory Hint In MBytes¶
- name: workingMemoryHintInMBytes, type: Integer, default: 5000, minimum: 0¶
A hint for the loader how much working memory (in megabytes) can be used. This, for example, allows using less memory at the expense of loading time. As a general hint, working memory larger than a loaded file size are very beneficial, however, not more than 30% of the physically available memory should be spent. Note that this only a hint and no obligatory limit.
Min Valid Second¶
- name: minValidSecond, type: Integer, default: 0, minimum: 0¶
The second after 1st of January 1970 which
H0_TimeSecondsmust have at least to be accepted as valid. IfH0_TimeSecondsis older then something is probably broken, for example the data/date connections to the sonar which created the data, did not deliver a valid date/time setting. As an example the second 1135296000 could be used, because it is roundabout year 2006 when R2Sonic was founded (= 365 x (36 years after 1970) x 24 x 3600 secs/h). Since R2Sonic devices did not create sensible data sets before, either the data creation unit did not deliver correct dates or the data set is invalid for other unknown reasons. If a sonar device does not have a valid time source then 0 should be used to accept all data sets.
Angle Of First Ping In Degree¶
- name: angleOfFirstPingInDegree, type: Float, default: -90, minimum: -400, maximum: 400¶
A ping contains a number of beams with each one a number of samples which result to a swath in 3D. The orientation of the swath is not defined in the WaterColum data. Therefore the angle over ground of the first swatch is defined with this angle.
Angle Offset Per Ping In Degree¶
- name: angleOffsetPerPingInDegree, type: Float, default: 3, minimum: -400, maximum: 400¶
Angular difference between two neighbor ping swaths. As described for
Angle Of First Ping In Degreeeach ping results to a swath in 3D. If a sonar device has a rotating head multiple swaths can result to a half sphere where all ping related swaths have a small angle difference. This difference/offset between swaths is defined withAngle Offset Per Ping In Degree. This value is used only ifAuto Calculate Angle Offset Per Pingis off, otherwise it is insensitive.
Auto Calculate Angle Offset Per Ping¶
- name: autoCalculateAngleOffsetPerPing, type: Bool, default: FALSE¶
If enabled then
Angle Offset Per Ping In Degreeis ignored and the value is determined fromFull Rotator Range In Degreeand the number of pings found in file, otherwise it is taken fromAngle Offset Per Ping In Degree.
Full Rotator Range In Degree¶
- name: fullRotatorRangeInDegree, type: Float, default: 360, minimum: -400, maximum: 400¶
Rotation angle of sonar rotator in degree for a full scan of multiple swaths; only used if
Auto Calculate Angle Offset Per Pingis on, otherwise unused and insensitive.
Actually Used Angle Offset Per Ping In Degree¶
- name: actuallyUsedAngleOffsetPerPingInDegree, type: Float, persistent: no¶
Output only field displaying the actually used angle offset between two pings/swaths, determined as described in
Auto Calculate Angle Offset Per Ping.
Mount Plane Tilt Offset In Degree¶
- name: mountPlaneTiltOffsetInDegree, type: Float, default: 0, minimum: -360, maximum: 360¶
Angle added to beam angles before calculating the sample position in cartesian coordinates. Changing this angle rotates a ping swath in its plane.
Add H0_RxMountTilt to Mount Plane Tilt¶
- name: addRxMountTiltToOffset, type: Bool, default: FALSE¶
If enabled the angle of file member RxMountTilt is added to
Mount Plane Tilt Offset In Degreewhile creating points from file samples, otherwise the information from RxMountTilt is ignored.
Stop¶
- name: stop, type: Trigger¶
Sensitive only while loading a file; if pressed then the load or update operation is interrupted as soon as possible. The current operation will finalize with an interruption error in this case.
PacketName¶
- name: PacketName, type: String, persistent: no¶
Name of WaterColumn packet, usually ‘WCD0’. It is the value of the first packet found in file.
PacketSize¶
- name: PacketSize, type: Integer, persistent: no¶
[bytes] The size of the WaterColumn ‘WCD0’ section in bytes. It is the value of the first section found in file.
DataStreamID¶
- name: DataStreamID, type: Integer, persistent: no¶
Reserved for future use. It is the value of the first section found in file.
H0_SectionName¶
- name: H0_SectionName, type: String, persistent: no¶
Name of WaterColumn H0 section, usually ‘H0’. It is the value of the first section found in file.
H0_SectionSize¶
- name: H0_SectionSize, type: Integer, persistent: no¶
[bytes] The size of the WaterColumn H1 section in bytes. It is the value of the first section found in file.
H0_ModelNumber¶
- name: H0_ModelNumber, type: String, persistent: no¶
[12 characters] Model number of the sonic device, for example “2024”, unused chars are shown dotted. It is the value of the first section found in file.
H0_SerialNumber¶
- name: H0_SerialNumber, type: String, persistent: no¶
[12 characters] Serial number of the sonic device, for example “100017”, unused chars are shown dotted. It is the value of the first section found in file.
H0_TimeSeconds¶
- name: H0_TimeSeconds, type: Integer, persistent: no¶
[seconds] Ping time in seconds, relative to 0000 hours 1-Jan-1970, integer part. It is the value of the first section found in file.
H0_TimeNanoseconds¶
- name: H0_TimeNanoseconds, type: Integer, persistent: no¶
[nanoseconds] Ping time in nanoseconds relative to 0000 hours 1-Jan-1970, fraction part. It is the value of the first section found in file.
H0_PingNumber¶
- name: H0_PingNumber, type: Integer, persistent: no¶
[integer] Pings since power-up or reboot. It is the value of the first section found in file.
H0_PingPeriod¶
- name: H0_PingPeriod, type: Float, persistent: no¶
[seconds] Time between most recent two pings in seconds. It is the value of the first section found in file.
H0_SoundSpeed¶
- name: H0_SoundSpeed, type: Float, persistent: no¶
[meters per second] Sound speed in meters per second. It is the value of the first section found in file.
H0_Frequency¶
- name: H0_Frequency, type: Float, persistent: no¶
[hertz] Sonar center frequency in hertz. It is the value of the first section found in file.
H0_TxPower¶
- name: H0_TxPower, type: Float, persistent: no¶
[dB re 1 uPa at 1 meter]. It is the value of the first section found in file.
H0_TxPulseWidth¶
- name: H0_TxPulseWidth, type: Float, persistent: no¶
[seconds] It is the value of the first section found in file.
H0_TxBeamwidthVert¶
- name: H0_TxBeamwidthVert, type: Float, persistent: no¶
[radians] Width of a beam in radians. It is the value of the first section found in file.
H0_TxBeamwidthHoriz¶
- name: H0_TxBeamwidthHoriz, type: Float, persistent: no¶
[radians] Height of a beam in radians. It is the value of the first section found in file.
H0_TxSteeringVert¶
- name: H0_TxSteeringVert, type: Float, persistent: no¶
[radians] It is the value of the first section found in file.
H0_TxSteeringHoriz¶
- name: H0_TxSteeringHoriz, type: Float, persistent: no¶
[radians] It is the value of the first section found in file.
H0_TxMiscInfo¶
- name: H0_TxMiscInfo, type: Integer, persistent: no¶
Reserved for future use. It is the value of the first section found in file.
H0_VTX_Plus_Offset¶
- name: H0_VTX_Plus_Offset, type: Integer, persistent: no¶
[hundredths of a dB] transmit voltage offset at time of ping (divide value by 100 to get dB). It is the value of the first section found in file.
H0_RxBandwidth¶
- name: H0_RxBandwidth, type: Float, persistent: no¶
[hertz]. It is the value of the first section found in file.
H0_RxSampleRate¶
- name: H0_RxSampleRate, type: Float, persistent: no¶
[hertz] Sample rate of data acquisition and signal processing in hertz.
H0_RxRange¶
- name: H0_RxRange, type: Float, persistent: no¶
[meters] Sonar range setting in meters. It is the value of the first section found in file.
H0_RxGain¶
- name: H0_RxGain, type: Float, persistent: no¶
[multiply by two for relative dB]. It is the value of the first section found in file.
H0_RxSpreading¶
- name: H0_RxSpreading, type: Float, persistent: no¶
[dB (times log range in meters)] The ocean setting describing the loss of intensity of a sound wave, due to dispersion of the wave front in dB (times log range in meters). It is the value of the first section found in file.
H0_RxAbsorption¶
- name: H0_RxAbsorption, type: Float, persistent: no¶
[dB per kilometer] The ocean setting describing the absorption in dB per kilometer. It is the value of the first section found in file.
H0_RxMountTilt¶
- name: H0_RxMountTilt, type: Float, persistent: no¶
[radians]. It is the value of the first section found in file.
H0_RxMiscInfo¶
- name: H0_RxMiscInfo, type: Integer, persistent: no¶
Reserved for future use. It is the value of the first section found in file.
H0_reserved¶
- name: H0_reserved, type: Integer, persistent: no¶
Reserved for future use. It is the value of the first section found in file.
H0_Beams¶
- name: H0_Beams, type: Integer, persistent: no¶
Number of beams per ping. It is the value of the first section found in file.
A1_SectionName¶
- name: A1_SectionName, type: String, persistent: no¶
[UInt16] Name of WaterColumn A1 section, usually ‘A1’. It is the value of the first section found in file.
A1_SectionSize¶
- name: A1_SectionSize, type: Integer, persistent: no¶
[UInt16] The size of the WaterColumn A1 section in bytes. It is the value of the first section found in file.
A1_MoreInfo¶
- name: A1_MoreInfo, type: String, persistent: no¶
[Float32][6] Reserved for future use. It is the value of the first section found in file.
A1_BeamAngle¶
- name: A1_BeamAngle, type: String, persistent: no¶
[Float32*H0_Beams] [radians] Angle of beam relative to array centerline, ordered from port to starboard, first angle < last angle in radians. It is the value of the first section found in file.
Mx_SectionName¶
- name: Mx_SectionName, type: String, persistent: no¶
Uint16-coded name of section (‘M1’ or ‘M2’) shown as string in this field. It is the value of the first section found in file.
Mx_SectionSize¶
- name: Mx_SectionSize, type: Integer, persistent: no¶
[UInt16] The size of the WaterColumn M1 or M2 section in bytes. It is the value of the first section found in file.
Mx_PingNumber¶
- name: Mx_PingNumber, type: Integer, persistent: no¶
[UInt32] The number of pings since power-up or reboot of the sonar device. It is the value of the first section found in file.
Mx_ScalingFactor¶
- name: Mx_ScalingFactor, type: Float, persistent: no¶
[Float32] Reserved for future use. It is the value of the first section found in file.
Mx_TotalSamples¶
- name: Mx_TotalSamples, type: Integer, persistent: no¶
[UInt32] Range samples in entire ping, sample rate is H0_RxSampleRate. It is the value of the first section found in file.
Mx_FirstSample¶
- name: Mx_FirstSample, type: Integer, persistent: no¶
[UInt32] First sample of this section. It is the value of the first section found in file.
Mx_Samples¶
- name: Mx_Samples, type: Integer, persistent: no¶
[UInt16] Number of samples in this section. It is the value of the first section found in file.
Mx_TotalBeams¶
- name: Mx_TotalBeams, type: Integer, persistent: no¶
[UInt16] Number of Beams (always a multiple of 2) (typically columns in your memory buffer). It is the value of the first section found in file.
Mx_FirstBeam¶
- name: Mx_FirstBeam, type: Integer, persistent: no¶
[UInt16] First beam of this section (always a multiple of 2). It is the value of the first section found in file.
Mx_Beams¶
- name: Mx_Beams, type: Integer, persistent: no¶
[UInt16] Number of beams in this section (always a multiple of 2). It is the value of the first section found in file.
Mx_reserved0¶
- name: Mx_reserved0, type: Integer, persistent: no¶
[UInt32] Reserved for future use. It is the value of the first section found in file.
Mx_reserved1¶
- name: Mx_reserved1, type: Integer, persistent: no¶
[UInt32] Reserved for future use. It is the value of the first section found in file.