PCLMovingLeastSquares¶
Purpose¶
Applies the pcl::MovingLeastSquares filter to the input point cloud and provides the filter result at the output. See pcl::MovingLeastSquares for details.
Windows¶
Default Panel¶
Input Fields¶
inputPCLObject0¶
- name: inputPCLObject0, type: PCLBaseObject(MLBase)¶
Connect the point cloud which shall be processed by the module.
For accessing this object via scripting, see the Scripting Reference:
MLPCLBaseObjectWrapper.
inputPCLObject1¶
- name: inputPCLObject1, type: PCLBaseObject(MLBase)¶
Here the “Distinct Point Cloud” must be connected if the
Upsampling MethodDISTINCT_POINT_CLOUD is selected. For technical reasons it must have be of the same point cloud type as the one atinputPCLObject0. IfUpsampling Methoddiffers from DISTINCT_POINT_CLOUD this connection is ignored.For accessing this object via scripting, see the Scripting Reference:
MLPCLBaseObjectWrapper.
Output Fields¶
outputPCLObject0¶
- name: outputPCLObject0, type: PCLBaseObject(MLBase)¶
Provides the result pcl::PointCloud if there is any, otherwise it will contain NULL output data. Corresponding indices produced by the filter are also provided in the output base object; possibly reduced by skipped ones if
Skip Nan Pointsis enabled.For accessing this object via scripting, see the Scripting Reference:
MLPCLBaseObjectWrapper.
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
For the documentation of the filter parameters see pcl::MovingLeastSquares.
Visible Fields¶
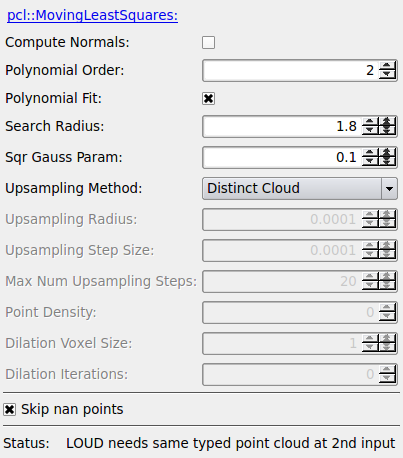
Status¶
- name: status, type: String, persistent: no¶
see PCLModule.status
Compute Normals¶
- name: computeNormals, type: Bool, default: FALSE¶
Determines whether the algorithm should also store the normals computed.
Polynomial Order¶
- name: polynomialOrder, type: Integer, default: 2¶
The order of the polynomial to be fit.
Polynomial Fit¶
- name: polynomialFit, type: Bool, default: TRUE¶
Defines whether the surface and normal are approximated using a polynomial, or only via tangent estimation.
Search Radius¶
- name: searchRadius, type: Double, default: 0.1¶
The sphere radius that is to be used for determining the k-nearest neighbors used for fitting; insensitive in case of
Search Method“MLS_NUM_POINTS”.
Max Num Points¶
- name: maxNumPoints, type: Integer, default: 5¶
The number of point used in the case of
Search Method“MLS_SEARCH_NUM_POINTS”; insensitive in case ofSearch Method“MLS_SEARCH_RADIUS” .
Search Method¶
- name: searchMethod, type: Enum, default: SEARCH_RADIUS¶
Selects the whether the default radius search is performed or the alternative implemented nearestKSearch search.
Values:
Title |
Name |
Description |
|---|---|---|
Radius |
SEARCH_RADIUS |
Use the default radius search for in order to find points in the neighborhood. |
Num Points |
SEARCH_NUM_POINTS |
Use the additionally implemented neareastKSearch in order to find points in the neighborhood. This is not part of the default PCL implementation. Instead of |
Sqr Gauss Param¶
- name: sqrGaussParam, type: Double, default: 0.1¶
The parameter used for distance based weighting of neighbors (the square of the search radius stables best in general).
Upsampling Method¶
- name: upsamplingMethod, type: Enum, default: NONE¶
The upsampling method to be used.
Values:
Title |
Name |
Description |
|---|---|---|
None |
NONE |
No upsampling will be done, only the input points will be projected to their own MLS surfaces. |
Distinct Cloud |
DISTINCT_CLOUD |
Will project the points of the distinct cloud to the closest point on the MLS surface. |
Sample Local Plane |
SAMPLE_LOCAL_PLANE |
The local plane of each input point will be sampled in a circular fashion using |
Random Uniform Density |
RANDOM_UNIFORM_DENSITY |
The local plane of each input point will be sampled using an uniform random distribution such that the density of points is constant throughout the cloud - given by the |
Voxel Grid Dilation |
VOXEL_GRID_DILATION |
The input cloud will be inserted into a voxel grid with voxels of size |
Upsampling Radius¶
- name: upsamplingRadius, type: Double, default: 0.01¶
The radius of the circle in the local point plane that will be sampled (used only in the case of SAMPLE_LOCAL_PLANE
Upsampling Method).
Upsampling Step Size¶
- name: upsamplingStepSize, type: Double, default: 0.01¶
The step size for the local plane sampling (used only in the case of SAMPLE_LOCAL_PLANE
Upsampling Method).
Max Num Upsampling Steps¶
- name: maxNumUpsamplingSteps, type: Integer, default: 50¶
Upsampling Radiusdivided byUpsampling Step Sizeis the number of iterations in both, the x and y dimension, thus it quadratically increases the number of performed calculations, if theUpsampling Methodis SAMPLE_LOCAL_PLANE. Since this happens easily,Max Num Upsampling Stepslimits the maximum number of performed iterations. If necessary theUpsampling Step Sizeis adapted automatically. IncreaseMax Num Upsampling Stepswith care to avoid very long calculations. This parameter is only used ifUpsampling Methodis SAMPLE_LOCAL_PLANE.
Point Density¶
- name: pointDensity, type: Integer, default: 0¶
Specifies the desired number of points within the search radius (used only in the case of RANDOM_UNIFORM_DENSITY
Upsampling Method).
Dilation Voxel Size¶
- name: dilationVoxelSize, type: Float, default: 1¶
The voxel size for the voxel grid (used only in the VOXEL_GRID_DILATION
Upsampling Method).
Dilation Iterations¶
- name: dilationIterations, type: Integer, default: 0¶
The number of dilation steps of the voxel grid (used only in the VOXEL_GRID_DILATION
Upsampling Method).
Skip Nan Points¶
- name: skipNanPoints, type: Bool, default: TRUE¶
If enabled then points with nan-values in x,y, or z are removed; if disabled then all values are passed unchanged with possible with nan’s.