ConstrainedConnectionCost¶
- MLModule¶
genre
author
package
dll
definition
see also
keywords
Purpose¶
The module ConstrainedConnectionCost calculates 2D connection cost of image voxels with respect to a given set of reference voxels.
Depth constraints of a marker image are taken into account. Connection costs are computed independently for each x-y slice of the input data.
Given the path cost as the maximum image value over all voxels belonging to a given path, the connection cost of two voxels is defined as the minimum path cost concerning all possible connections between them.
Hence, the connection cost between two points x and y corresponds to the minimum barrier that must be crossed in order to pass from x to y.
Starting at the set of reference voxels, the algorithm results in filling all the local valleys present in the image.
Usage¶
Computes an image of minimum values (CCC values) that any path from the boundary needs to overcome to reach a voxel in a slice.
The result is displayed directly or used to show the difference between this value and the original or to mask out parts of the image.
Details¶
The reference set for the connection cost consists of all voxels v where input1(v) is less than input0(v). For the other voxels, input1 provides a local upper constraint for the calculated connection cost.
If no reference image is used, connection costs are calculated with respect to the border of image input0 (i.e., for filling holes in binary masks).
The module works globally in the x-y plane; hence, the page extent is set appropriately.
Windows¶
Default Panel¶
Input Fields¶
input0¶
- name: input0, type: Image¶
Primary input: image data. Common gray scale images or binary images are typical use cases
input1¶
- name: input1, type: Image¶
Marker image for use with the use marker image option, an alternative to computing connection costs with respect to the image boundary.
Output Fields¶
output0¶
- name: output0, type: Image¶
The resulting image
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
Visible Fields¶
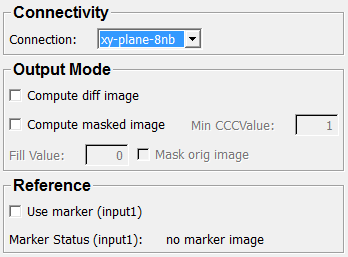
Use marker (input1)¶
Compute Diff Image¶
- name: computeDiffImage, type: Bool, default: FALSE¶
If checked, the difference image is computed.
Compute Masked Image¶
- name: computeMaskedImage, type: Bool, default: FALSE¶
If checked, this option will mask the output so that only parts where the CCC exceeds
Min CCCValueare present in the output image.Voxels with a CCC below
Min CCCValuewill be assigned the specified :field:fillValue; the rest of the output depends on further settings (i.e., one will receive either the CCC values, the original values, or the difference between the CCC and original values).
Min CCCValue¶
- name: minCCCValue, type: Double, default: 1¶
Sets the threshold of CCC used in masking.
Fill Value¶
- name: fillValue, type: Double, default: 0¶
Sets the fill value for the background region in the masking mode.
Mask Orig Image¶
- name: maskOrigImage, type: Bool, default: FALSE¶
If checked, the masked original image will be displayed in the output for voxels with a CCC above
Min CCCValue, instead of showing CCC values.Only used if
Compute Masked Imageis active.
Marker Status (input1)¶
- name: markerStatus, type: String, persistent: no, deprecated name: MarkerStatus¶
Shows information about the marker input image.
Connection¶
- name: connectionMode, type: Enum, default: ConnectXY, deprecated name: Connection¶
Defines the path along which the connection cost are evaluated.
For standard purposes, all paths in the x-y plane are feasible; however, using only paths parallel to the x or y-axis may be useful in specific cases.
Values:
Title |
Name |
Deprecated Name |
Description |
|---|---|---|---|
xy-plane-8nb |
ConnectXY |
xy-plane |
Connections over all eight 2D neighbor voxels are considered. |
xy-plane-4nb |
ConnectXY4NB |
Connections over only the closest four 2D neighbor voxels are considered. |
|
x-axis |
ConnectX |
x-axis |
Connections over only the two neighbor voxels in 1D rows are considered. |
y-axis |
ConnectY |
y-axis |
Connections over only the two neighbor voxels in 1D columns are considered. |