CavitySeeker¶
Purpose¶
The module CavitySeeker searches for cavities in the image by exploiting a 2D-area around each voxel.
A cavity is defined as a dark area of limited size (mostly) surrounded by a wall of brighter voxels.
Usage¶
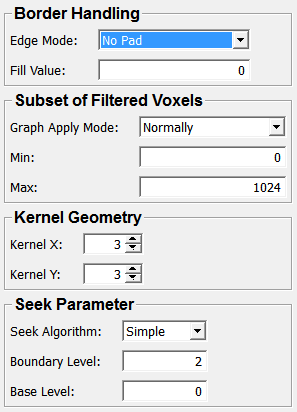
After selecting appropriate settings for the standard kernel type filter, the operation of the CavitySeeker is adjusted using the fields Seek Algorithm, Boundary Level, and Base Level.
Windows¶
Default Panel¶
Input Fields¶
input0¶
- name: input0, type: Image¶
Output Fields¶
output0¶
- name: output0, type: Image¶
A voxel mask with the identified cavities. The given values represents the level of trust.
Parameter Fields¶
Visible Fields¶
Seek Algorithm¶
- name: seekAlgorithm, type: Enum, default: SeekSimple, deprecated name: SeekAlgorithm¶
Defines how to extend incomplete surrounded dark areas of the image.
Values:
Title |
Name |
Description |
|---|---|---|
Simple |
SeekSimple |
Each radial path hitting a wall of the cavity is counted individually and the total sum is related to the sum of radial paths. |
Across |
SeekAcross |
The existence of a cavity wall is suggested only if hits are recorded at diametrical points. |
Composit |
SeekComposit |
A combination of both former criteria where the count of simple hits is qualified by the solidness of the wall. |
Boundary Level¶
- name: boundaryLevel, type: Double, default: 2, deprecated name: BoundaryLevel¶
Sets the value of potential cavity walls, which are defined by image voxels with intensities above:
(
Base Level+ (Value of image at seek-location) *Boundary Level)
Base Level¶
- name: baseLevel, type: Double, default: 0, deprecated name: BaseLevel¶
Sets the value of potential cavity walls, which are defined by image voxels with intensities above:
(
Base Level+ (Value of image at seek-location) *Boundary Level)