CSOGenerateSmoothSurfaceFromSparseContours¶
- MLModule¶
genre
author
package
dll
definition
see also
keywords
contour,spline,surface,interpolation,approximation,voxelize,rasterize
Purpose¶
The module CSOGenerateSmoothSurfaceFromSparseContours converts any number of CSOs to a mask image.
The CSOs can lie in parallel, orthogonal, or in any angle to each other. One CSO is sufficient, though.
Note that only closed CSOs are considered in the algorithm!
All existing CSOs are interpolated by computing a 3D implicit function that describes a surface, and this surface is scanned using a recursive marching-cubes algorithm. The resulting surface is rasterized to the output image and can also be filled. Additionally, the output mask can be rasterized with anti-aliasing.
Usage¶
Connect a CSOList and an image to the module, adjust the parameters and press Update.
Details¶
Internally, an algorithm is used that is described in the paper Shape Transformation Using Variational Implicit Functions by Greg Turk and James F. O’Brian. This algorithm constructs a 3D thin-plate spline function on behalf of the path points of the contours with the condition that the path points lie on the resulting surface. The resulting implicit distance function computes to 0 at these positions, and at points along the inward normal it computes to a set value other than 0 (-1 in this case).
This means that the accuracy of the module depends on the number of path points, but since the number of path points also reigns the number of parameters of the constructed implicit function, the speed of the module also depends on the number of path points.
With the implicit function constructed, a recursive marching-cube algorithm scans the surface. This algorithm is designed in a way that all unconnected surfaces are scanned. The resulting cells that were used for scanning the surface are sorted along the z-axis with a bucket sort for a fast slice-wise access. If the resulting mask image should be filled, a scan line algorithm is applied on the computed surface cells of each current slice. Note that surfaces can be clipped by the image’s extend. The filling algorithm can fill such clipped surfaces nevertheless.
If a filled mask should be generated, the surface voxels of the mask can be anti-aliased. In this case, an interpolated value between the background and the foreground value is computed on the base of how the surface really cuts the according cell of the marching cube algorithm. Note that using anti-aliasing is not recommended if the surface is not filled.
A more detailed description of the algorithm can be found in the paper Interactive 3D Medical Image Segmentation with Energy-Minimizing Implicit Functions by Heckel et al.
Tips¶
If the computation takes too long with a certain set of CSOs, try to convert the CSOs with the option Use only first CSO for start scanning checked.
If the CSOs are too dense, the resulting surface function may oscillate, leading to a very wrong surface and often multiple scans of this wrong surface. If the target image is large enough, this can even lead to a crash of MeVisLab. Consider this option a testing or debugging option, or check it if you are sure that only one connected mask results from the set of input CSOs (for a speed up because certain tests are omitted then).
Also, with very large CSOs, try to use only the seed points. Note, however, that the results may vary heavily if the CSOs are generated by a spline approximation where the seed points do not lie on the path of the approximated path points.
If the CSOs that are to be converted are generated by the CSOLiveWireProcessor or by the CSOIsoGenerator or CSOIsoProcessor without using any smoothing, the resulting spline surface may oscillate (forming ‘bubbles’). This is due to steep angles in the CSOs which causes the spline interpolation surface to take ‘detours’ to fit the path points that are left over after an internal point reduction process which is necessary to keep the total amount of considered points low (or otherwise the used matrix inversion fails due to a too large memory consumption).
In order to produce an acceptable result, try checking the option Use smoothing for path points which converts the path points (which may contain said steep angles) into a spline approximation which is generally much smoother and thus less prone to oscillation.
That option may always be turned on, because the resulting surface does not differ much from a surface obtained from not-smoothed path points in case of the CSOs being smooth anyway.
The resulting surface with using the internal spline approximation is just a little bit smaller than a surface without using that option.
Windows¶
Default Panel¶
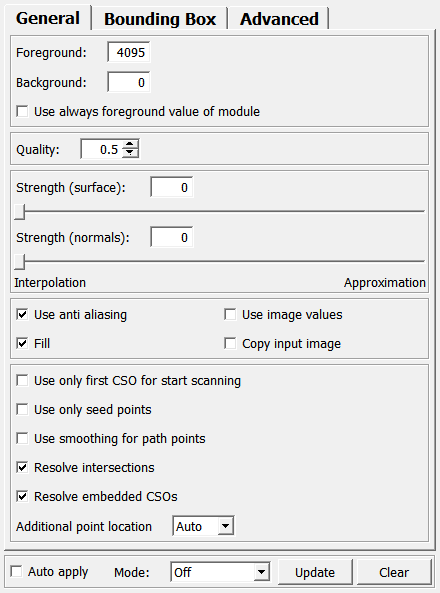
Input Fields¶
input0¶
- name: input0, type: Image¶
Input reference image. Can also be copied to the output.
inCSOList¶
- name: inCSOList, type: CSOList(MLBase)¶
The CSOList that should be converted into a 3D mask.
For accessing this object via scripting, see the Scripting Reference:
MLCSOListWrapper.
Output Fields¶
output0¶
- name: output0, type: Image¶
A mask image.
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Visible Fields¶
Mode¶
- name: updateMode, type: Enum, default: AutoClear¶
Defines how the module reacts to input changes.
Values:
Title |
Name |
Description |
|---|---|---|
Off |
Off |
The module does not react to input changes. |
Auto Update |
AutoUpdate |
The module computes anew if any input changes or if a valid notification is triggered. |
Auto Clear |
AutoClear |
Auto apply¶
- name: autoApply, type: Bool, default: FALSE¶
If checked, the module computes anew on a change of any field on the GUI.
Update¶
- name: apply, type: Trigger¶
When pressed, the module computes anew.
Foreground¶
- name: foregroundValue, type: Float, default: 4095¶
Sets the target object value if the CSOs are all set to use the module’s voxel write value (the default).
Background¶
- name: backgroundValue, type: Float, default: 0¶
Sets the target background value if the input image should not be copied (
Use image values).
Use image values¶
- name: useImageValues, type: Bool, default: FALSE¶
If checked, the image’s values are written into the output image instead of the foreground values.
Fill¶
- name: fillSurface, type: Bool, default: TRUE¶
If checked, the resulting surface is filled with the object values.
Copy input image¶
- name: copyInputImage, type: Bool, default: FALSE¶
If checked, the background is filled with the input image’s values and the target object values are replacing those values.
Repaint¶
Finishing¶
Margin¶
- name: boundingBoxMargin, type: Integer, persistent: no¶
Sets an augmentation value for the voxel bounding box.
Start (startVoxelBoundingBox)¶
- name: startVoxelBoundingBox, type: Vector3, persistent: no¶
Shows the upper front left corner position of the voxel bounding box.
End (endVoxelBoundingBox)¶
- name: endVoxelBoundingBox, type: Vector3, persistent: no¶
Shows the lower rear right corner position of the voxel bounding box.
Start (startWorldBoundingBox)¶
- name: startWorldBoundingBox, type: Vector3, persistent: no¶
Shows the upper front left corner of the bounding box in world coordinates.
End (endWorldBoundingBox)¶
- name: endWorldBoundingBox, type: Vector3, persistent: no¶
Shows the lower rear right corner of the bounding box in world coordinates.
String¶
- name: voxelBoundingBoxString, type: String, persistent: no¶
Shows the voxel bounding boxes start and end position as a string consisting of six 3D coordinates separated by a space.
Use Always Foreground Value Of Module¶
- name: useAlwaysForegroundValueOfModule, type: Bool, default: FALSE¶
If checked, the voxel write mode of the CSO or CSOGroup is ignored and the foreground value of the module is used in any case.
Clear¶
- name: clear, type: Trigger¶
When pressed, the output image is cleared.
Use anti aliasing¶
- name: useAntiAliasing, type: Bool, default: TRUE¶
If checked, the target surface values are computed by using a linear interpolation scheme between the object and the background value.
Note that results may appear unsatisfying if this option is used with non-filled objects.
Quality¶
- name: quality, type: Float, default: 0.5, minimum: 0, maximum: 1¶
Sets the quality and speed of the conversion. This value defines the portion of contour points used for computation. Thus, a low value means a low quality but a higher speed.
Use only first CSO for start scanning¶
- name: useOnlyFirstCSOForStartScanning, type: Bool, default: FALSE¶
If checked, only the first CSO is used to start the scanning of the surface with the recursive marching cubes algorithm.
Use only seed points¶
- name: useOnlySeedPoints, type: Bool, default: FALSE¶
If checked, only the seed points are used to build the implicit function; otherwise, the path points are used.
Resolve embedded CSOs¶
- name: resolveEmbeddedCSOs, type: Bool, default: TRUE¶
If checked, the module determines the level of embedding of CSOs and treats inner CSOs by inverting their normals.
By checking this option, inner CSOs can lead to holes in the mask in simple cases. Since the mask is in 3D, not all levels of embedding can be resolved to full satisfaction.
Use smoothing for path points¶
- name: useSplineApproximationSmoothing, type: Bool, default: FALSE¶
If checked, the path points are internally smoothed by converting them into a spline approximation. This parameter does not change the result if the module works on seed points only.
Additional point location¶
- name: additionalPointLocation, type: Enum, default: Auto¶
Defines how the algorithm computes additional points (i.e., normals) for establishing the spline function.
Values:
Title |
Name |
Description |
|---|---|---|
Inner |
Inner |
Additional points are generated inside the contours. |
Outer |
Outer |
Additional points are generated outside the contours. |
Auto |
Auto |
The side on which additional points are generated is automatically computed. Using this option is slower but can handle self-intersecting contours. |
Resolve intersections¶
- name: resolveIntersections, type: Bool, default: TRUE¶
If checked, additional tests are performed for detecting self-intersections and the module resolves those issues automatically.
Strength (surface)¶
- name: regularizationStrength, type: Float, default: 0, minimum: 0, maximum: 100¶
Sets the strength for regularization of contour points. The larger this value, the more the contour points are approximated instead of interpolated. Setting this parameter to a value >0 also increases the robustness of the algorithm.
Strength (normals)¶
- name: regularizationStrength2, type: Float, default: 0, minimum: 0, maximum: 100¶
Sets the strength for regularization of normals. The larger this value, the more the normal of the surface in each contour point is approximated instead of interpolated. Setting this parameter to a value >0 also increases the robustness of the algorithm.
Inner Point Scale¶
- name: innerPointScale, type: Float, default: 0.25, minimum: 0, maximum: 1¶
Sets a scale factor for the distance of additional point to the original points. This additional point represents the normal in the original point. If the contours are very narrow and the result yields errors, try a smaller value here. However, a too small value degenerates the result as well.
Maximum Number of Points¶
- name: maxNumPoints, type: Integer, default: 10000, minimum: 0¶
Sets a limit to the number of points used for establishing the spline function.
The more points, the longer the module computes but the result is generally more precise.
Number of Threads¶
- name: numThreads, type: Integer, default: 4, minimum: 1¶
Sets the number of threads for parallel computing. Currently, only some parts of the algorithm are parallelized. Typically, it does not make sense to set this value larger than four.
Code Path¶
- name: codePath, type: Enum, default: SSE3¶
Sets the code path used for evaluation of the implicit function. This mainly affects the voxelization step.
Values:
Title |
Name |
Description |
|---|---|---|
Fpu |
FPU |
Uses the FPU for computation. |
Sse3 |
SSE3 |
Uses the SSE3 instruction set for parallel computation (supported on all modern 64-Bit CPUs (particularly, since AMD Athlon 64 and Intel Pentium 4 Prescott). |
Use logging¶
- name: logging, type: Bool, default: FALSE¶
If checked, some internal states are written to the console.