PCLMarchingCubesRBF¶
-
MLModule¶ genre PCLSurfaceauthor Wolf Spindlerpackage FMEstable/PCLdll MLPCLSurfacedefinition MLPCLSurface.def see also WEMIsoSurface,PCLMarchingCubesHoppeinherits from PCLModulekeywords points,clouds,surface,reconstruction,PCL,crop,box,hoppe,rbf
Purpose¶
Applies the pcl::MarchingCubesRBF filter to the input point cloud and provides the filter result two outputs, once as pcl::Surface and once as pcl::PointCloud. See pcl::MarchingCubesRBF for details.
Input Fields¶
Output Fields¶
outputPCLObject0¶
-
name:outputPCLObject0, type:MLBase¶ Provides the result pcl::PolygonMesh if there is any, otherwise it will contain NULL output data. This module does not set up any indices in the output base object 0.
outputPCLObject1¶
-
name:outputPCLObject1, type:MLBase¶ Provides a pcl::PointCloud converted from the result pcl::PolygonMesh if there was any, otherwise it will contain NULL output data. Indices produced by the filter are also provided in the output base object 1 (the default indices for all input points), however, perhaps the vertices delivered by the surface at
outputPCLObject0might be more the actually wanted information.
Parameter Fields¶
For the documentation of filter parameters see pcl::MarchingCubesRBF.
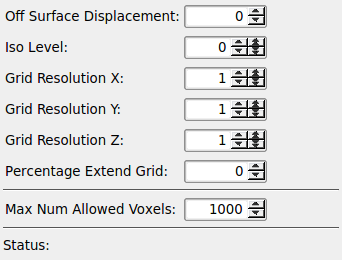
Visible Fields¶
Max Num Allowed Voxels¶
-
name:maxNumAllowedVoxels, type:Integer, default:1000¶ This parameter is used for testing the number of points in the input cloud before it starts processing. If the incoming number of points exceeds this value the algorithms is not started but an error is posted. This is important, because pcl::MarchingCubesRGBF has a complexity of O(#InVoxels * #InVoxels) which makes the computation time increase noticeably with the number of input voxels. Change this limit carefully.