PCLIterativeClosestPoint¶
- MLModule¶
genre
author
package
dll
definition
see also
inherits from
keywords
Purpose¶
Uses the PCL Iterative Closest Point algorithm to find a transformation from the point cloud at inputPCLObject0 to inputPCLObject1 such that both point clouds match as good as possible.
Windows¶
Default Panel¶
Input Fields¶
inputPCLObject0¶
- name: inputPCLObject0, type: MLBase¶
Connect the source point cloud which shall be transformed and mapped onto the point cloud at
inputPCLObject1by the calculated transformation after registration.
inputPCLObject1¶
- name: inputPCLObject1, type: MLBase¶
Connect the so-called target point cloud onto which the point cloud at
inputPCLObject0shall be transformed by the calculated registration. Must contain at least one point to allow valid calculations of the module.
Output Fields¶
outputPCLObject0¶
- name: outputPCLObject0, type: MLBase¶
The point cloud resulting from the
inputPCLObject0transformed with the calculation result. Indices created by the algorithm are also provided in the output base object.
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
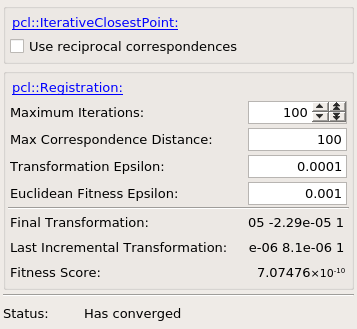
Visible Fields¶
Status¶
- name: status, type: String, persistent: no¶
Shows status information about processing results, or in case of errors, some information about reasons.
see also PCLModule.status
Maximum Iterations¶
- name: maximumIterations, type: Integer, default: 50¶
The maximum number of iterations the internal optimization should run for.
Max Correspondence Distance¶
- name: maxCorrespondenceDistance, type: Double, default: 1.34078079299426e+154¶
The maximum distance threshold between two correspondent points in source and target. If the distance is larger than this threshold, the points will be ignored in the alignment process.
Transformation Epsilon¶
- name: transformationEpsilon, type: Double, default: 1e-08¶
The transformation epsilon (maximum allowable difference between two consecutive transformations) in order for an optimization to be considered as having converged to the final solution.
Euclidean Fitness Epsilon¶
- name: euclideanFitnessEpsilon, type: Double, default: -1.79769313486232e+308¶
The maximum allowed Euclidean error between two consecutive steps in the ICP loop, before the algorithm is considered to have converged; the error is estimated as the sum of the differences between correspondences in an Euclidean sense, divided by the number of correspondences.
Final Transformation¶
- name: finalTransformation, type: Matrix, persistent: no¶
Output only: the final transformation matrix estimated by the registration method.
Last Incremental Transformation¶
- name: lastIncrementalTransformation, type: Matrix, persistent: no¶
Output only: the last incremental transformation matrix estimated by the registration method.
Fitness Score¶
- name: fitnessScore, type: Double, persistent: no¶
Output only: the Euclidean fitness score (e.g., sum of squared distances from the source to the target).
Use Reciprocal Correspondences¶
- name: useReciprocalCorrespondences, type: Bool, default: FALSE¶
Determines whether to use reciprocal correspondence or not.