PCLInfo¶
- MLModule¶
genre
author
package
dll
definition
see also
inherits from
keywords
Purpose¶
PCLInfo displays information about a connected point cloud or polygon mesh, either for diagnostic or for display purposes. It allows peeking into basic cloud or polygon mesh settings and its point and vertex values.
See http://pointclouds.org/documentation/tutorials/basic_structures.php#basic-structures for details about the basic point cloud members, especially about the Width and Height fields, which have two meanings.
Windows¶
Default Panel¶
Input Fields¶
inputPCLObject0¶
- name: inputPCLObject0, type: MLBase¶
Connect the point cloud or polygon mesh from which information shall be retrieved.
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Visible Fields¶
Status¶
- name: status, type: String, persistent: no¶
see PCLModule.status
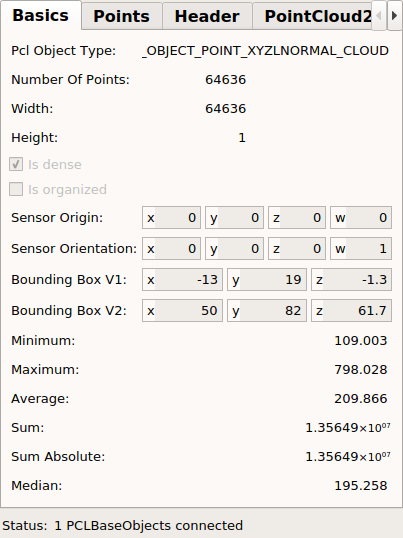
Pcl Object Type¶
- name: pclObjectType, type: String, persistent: no¶
Shows of which type the connected PCL object is.
Number Of Points¶
- name: numberOfPoints, type: Integer, persistent: no¶
Displays the number of points in the connected point cloud. It is not a member of the point cloud but the product of the
Widthand theHeightmember. SeeHeightandIs Organizedfor details.
Width¶
- name: width, type: Integer, persistent: no¶
The width of the point cloud extent, or, if
Heightis 1, the total number of points in the point cloud. SeeHeightandIs Organizedfor details.
Height¶
Seq¶
- name: seq, type: Integer, persistent: no¶
Displays the header.seq member of the point cloud.
Stamp¶
- name: stamp, type: Integer, persistent: no¶
Displays the header.stamp member of the point cloud.
Frame Id¶
- name: frameId, type: String, persistent: no¶
Displays the header.frame_id member of the point cloud.
Is Organized¶
Is Dense¶
Sensor Origin¶
- name: sensorOrigin, type: Vector4, persistent: no¶
Displays the position of the acquisition sensor of the point set if there was any, it is of type Eigen::Vector4f.
Sensor Orientation¶
- name: sensorOrientation, type: Vector4, persistent: no¶
Displays the orientation of the acquisition sensor of the point set if there was any, it is of type Eigen::Quaternionf.
Bounding Box V1¶
- name: boundingBoxV1, type: Vector3, persistent: no¶
The first (smaller) corner of the bounding box of the point cloud. If larger than
Bounding Box V2the box is empty or undefined. For surfaces the box is considered empty.
Bounding Box V2¶
- name: boundingBoxV2, type: Vector3, persistent: no¶
The second (larger) corner of the bounding box of the point cloud. If smaller than
Bounding Box V1the box is empty or undefined. For surfaces the box is considered empty.
Minimum¶
- name: minimum, type: Double, persistent: no¶
The minimum of all replacement values or DBL_MAX if no values or empty point cloud. This value is only calculated for point clouds, not for surfaces.
Maximum¶
- name: maximum, type: Double, persistent: no¶
The maximum of all replacement values or -DBL_MAX if no values or empty point cloud. This value is only calculated for point clouds, not for surfaces.
Average¶
- name: average, type: Double, persistent: no¶
The average of all intensity replacement values or 0 if no values or empty point cloud. This value is only calculated for point clouds, not for surfaces.
Sum¶
- name: sum, type: Double, persistent: no¶
The sum of all intensity replacement values or 0 if no values or empty point cloud. This value is only calculated for point clouds, not for surfaces.
Sum Absolute¶
- name: sumAbsolute, type: Double, persistent: no¶
The sum of all absolute values of intensity replacement values or 0 if no values or empty point cloud. This value is only calculated for point clouds, not for surfaces.
Median¶
- name: median, type: Double, persistent: no¶
The
Number Of Points/2 value after sorting all intensity replacement values or 0 if no values or empty point cloud. This value is only calculated for point clouds, not for surfaces.
Index Of First Point¶
Max Num Shown Points¶
Num Decimal Places¶
- name: numDecimalPlaces, type: Integer, default: -1¶
The maximum number of digits to be printed after the comma or the full precision of the given field type if -1. The printed value is rounded appropriately.
Points Print Format¶
- name: pointsPrintFormat, type: String¶
- Only for normal point clouds: If empty then all point fields are printed, otherwise substrings of
Points Print Formatare replaced with field values from each printed point (or with “” if not available). For example for one point at index 67 $(index):$(x), $(y), $(z): $(ir) prints the point index followed by the point coordinates and the intensity replacement value (such as 67:0.3, 1.7, 5.2: 200.0 or so). Other fields are ignored even if they are available. Substrings to replace are: - $(x) or $(data[0]): x-component of point coordinate$(y) or $(data[1]): y-component of point coordinate$(z) or $(data[2]): z-component of point coordinate$(data[3]): fourth component of point coordinate$(nx) or $(data_n[0]): x-component of normal$(ny) or $(data_n[1]): y-component of normal$(nz) or $(data_n[2]): z-component of normal$(data_n[3]): fourth component of normal$(ir): intensity replacement value.$(curvature): curvature.$(rgba): rgba as hexadecimal value if available otherwise 0x00000000.$(intensity): intensity value.$(label): label as integer.$(index): The index of the point in the point cloud.
- Only for normal point clouds: If empty then all point fields are printed, otherwise substrings of
Is Big Endian¶
- name: isBigEndian, type: Integer, persistent: no¶
Displays the pcl::uint8_t is_bigendian member value of a PCLPointCloud2 of a possibly connected pcl::PolygonMesh. 0 if no such mesh is connected.
fields (offset, data type, count, name)¶
- name: fields, type: String, persistent: no¶
Displays the std::vector<pcl::PCLPointField> fields member value of a PCLPointCloud2 of a possibly connected pcl::PolygonMesh. Empty if no such mesh is connected.
Point Step¶
- name: pointStep, type: Integer, persistent: no¶
Displays the pcl::uint32_t point_step member value of a PCLPointCloud2 of a possibly connected pcl::PolygonMesh. 0 if no such mesh is connected.
Row Step¶
- name: rowStep, type: Integer, persistent: no¶
Displays the pcl::uint32_t row_step member value of a PCLPointCloud2 of a possibly connected pcl::PolygonMesh. 0 if no such mesh is connected.
Index Of First Vertex¶
Max Num Shown Vertices¶
Number Of Vertices¶
- name: numberOfVertices, type: Integer, persistent: no¶
Displays the number of vertices of a connected input polygon mesh; for point clouds it will always be 0.
Vertices¶
- name: vertices, type: String, persistent: no¶
A text field displaying at most
Max Num Shown Verticesstarting atIndex Of First Vertexof the connected point set. It references points displayed inPointswhose meaning is described infields (offset, data type, count, name).
Index Of First Index¶
Max Num Shown Indices¶
Number Of Indices¶
Indices¶
- name: indices, type: String, persistent: no¶
A text field displaying at most
Max Num Shown Indicesstarting atIndex Of First Indexof the connected point cloud.
Point Structure¶
Points¶
- name: points, type: String, persistent: no¶
A text field displaying at most
Max Num Shown Pointsstarting atIndex Of First Pointof the connected point set. SeePoint Structureto understand which meaning the values of the points have. In case of displayed polygon meshes it displays the decoded data section which is coded as described infields (offset, data type, count, name).