PCLCompare¶
- MLModule¶
genre
author
package
dll
definition
see also
inherits from
keywords
Purpose¶
PCLCompare compares two point clouds of the PCL (Point Cloud Library) which are connected to its inputs. It is configurable which members of the point clouds shall be compared. The comparison generates a report which is optionally posted as ML error to the ML error manager. This especially can be useful to recognize failures in tests. Note that output indices are still not compared.
Windows¶
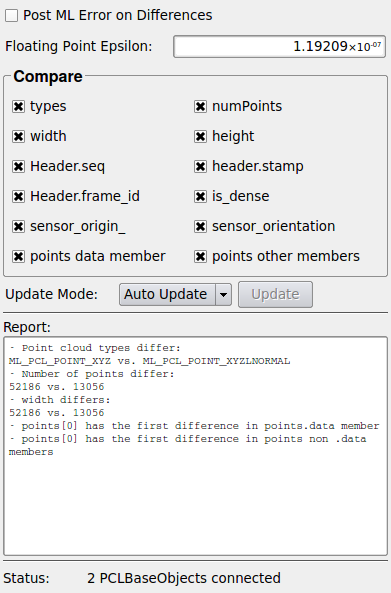
Default Panel¶
Input Fields¶
inputPCLObject0¶
- name: inputPCLObject0, type: MLBase¶
Input for the first of the two point clouds of the PCL (Point Cloud Library) to be compared.
inputPCLObject1¶
- name: inputPCLObject1, type: MLBase¶
Input for the second of the two point clouds of the PCL (Point Cloud Library) to be compared.
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Visible Fields¶
Update Mode¶
- name: updateMode, type: Enum, default: AutoClear¶
If AutoUpdate is used then
PCLComparealways updates its comparison if any input or parameter changes. If AutoClear is used thenReportis reset to an empty string on any input or parameter change, and a new comparison is only done ifUpdateis pressed.
Update¶
- name: update, type: Trigger¶
If pressed then the two input point clouds are compared. This button is only sensitive if
Update Modeis AutoClear.
Status¶
- name: status, type: String, persistent: no¶
Shows information about the state input connectors.
see also PCLModule.status
Report¶
- name: report, type: String, persistent: no¶
Displays the comparison result for the two connected point clouds. If no valid comparison is available, for example if
Update Modeis AutoClear andUpdatewas not pressed, then the field is empty.
Post ML Error on Differences¶
- name: postMLError, type: Bool, default: TRUE¶
If enabled then in each comparison which detects an inequality between the input point clouds, an ML error is posted to the ML error manager. This is especially useful if
PCLCompareis used for testing. If disabled then onlyReportis updated after the comparison.
Floating Point Epsilon¶
- name: epsilon, type: Double, default: 1.19209289550781e-07¶
This specifies the epsilon value used for floating point comparisons. The default comes from FLT_EPSILON, the smallest value between the float number 1 and another value which can be represented.
types¶
- name: compareTypes, type: Bool, default: TRUE¶
If enabled then the point cloud types are compared, otherwise not.
numPoints¶
- name: compareNumPoints, type: Bool, default: TRUE¶
If enabled then the number of points in the point clouds are compared, otherwise not.
width¶
- name: compareWidths, type: Bool, default: TRUE¶
If enabled then the width members of the point clouds are compared, otherwise not.
height¶
- name: compareHeight, type: Bool, default: TRUE¶
If enabled then the height members of the point clouds are compared, otherwise not.
Header.seq¶
- name: compareHeaderSeq, type: Bool, default: TRUE¶
If enabled then the header.seq members of the point clouds are compared, otherwise not.
header.stamp¶
- name: compareHeaderStamp, type: Bool, default: TRUE¶
If enabled then the header.stamp members of the point clouds are compared, otherwise not.
Header.frame_id¶
- name: compareHeaderFrameId, type: Bool, default: TRUE¶
If enabled then the header.frame_id members of the point clouds are compared, otherwise not.
is_dense¶
- name: compareIsDense, type: Bool, default: TRUE¶
If enabled then the is_dense members of the point clouds are compared, otherwise not.
sensor_origin_¶
- name: compareSensorOrigin, type: Bool, default: TRUE¶
If enabled then the sensor_origin_ members of the point clouds are compared, otherwise not.
sensor_orientation_¶
- name: compareSensorOrientation, type: Bool, default: TRUE¶
If enabled then the sensor_orientation_ members of the point clouds are compared, otherwise not.
points data member¶
- name: comparePointsDataMember, type: Bool, default: TRUE¶
If enabled then the point.data members of the points member of the point clouds are compared, otherwise not.
points other members¶
- name: comparePointsOtherMembers, type: Bool, default: TRUE¶
If enabled then all other members of the points member of the clouds are compared, otherwise not.
Test Passed¶
- name: testPassed, type: Bool, persistent: no¶
Test Passedis enabled after a comparison without recognized differences. If any differences are found or no comparison was performed then it is disabled.Test Passedis especially useful in tests to check for a successful comparison.