QuadratureFilter¶
-
MLModule¶ genre Filtersauthors Ola Friman,Mats Andersson,Hans Knutsson,Lennart Tautz,Joachim Georgiipackage FMEwork/ReleaseMeVisdll MLQuadratureFilterdefinition MLQuadratureFilter.def see also QuadratureToTensor,TensorToEigensystemkeywords quadrature,filter,log,Gabor,normal,complex,phase,edge,energy,orientation
Purpose¶
The QuadratureFilter module applies a set of band-pass quadrature filters to the input image. Band-pass quadrature filters are frequently used to estimate local image features such as edges, phase, frequency, energy and orientation.
Usage¶
The module works on regular image data (2D or 3D). It outputs filtered image data (complex valued) and an XMarkerList containing the directions of the quadrature filters. The filter responses are stored in the u-dimension.
Details¶
The module applies a set of Log-Normal (also known as Log-Gabor) quadrature filters. A set contains several quadrature filters, where each filter has a different orientation. Each quadrature filter measures the energy in the Fourier domain in one direction. The Log-Normal filter kernel can in the Fourier domain be expressed as a polar separable function
where ρ is the radial distance and x̂ is a unit vector. The name Log-Normal refers to the radial function, which has the form of a Normal or Gaussian curve on a logarithmic scale:
where ρ₀ is the center frequency of the band pass filter and B is the (relative) bandwidth. The bandwidth is in this module fixed to B=2. The plot below shows three different radial functions for the center frequencies 2π/8 (blue), 3π/8 (green) and 4π/8 (red).
For negative frequencies the radial function is zero. That is, the quadrature filters are not symmetric in the Fourier domain and therefore complex valued in the spatial domain. The angular part has the form of a cos²() function which can be expressed as the following inner product
where n̂ is the direction of the filter in 2D or 3D space (or higher). Below, the Fourier domain functions of three 2D Log-Normal filters with B=2 and

are shown. These filters have the directions

and
respectively.
It is critical that the quadrature filters have zero DC level. Therefore, to obtain optimal performance, the filter kernels in this module have been pre-optimized numerically to fit the ideal filter functions in the Fourier domain and to have as compact spatial support as possible. The following formulas can be used to determine a suitable filter center frequency and bandwidth. Say we want to detect objects in an image that are between x₁ and x₂ voxels large. The center frequency is then set to the geometric mean of the frequency range we want to detect:
Inserting this center frequency in the radial function above, we can find the bandwidth B with which the radial response decays to 0.5 at the limits p/x₁ and p/x₁. We then get the following formula for B:

For example, if we want to detect objects between 2 and 8 voxels, we would choose a center frequency of p/4 and a bandwidth of 2.
Input Fields¶
The module takes an image volume as input. Note that the filters operate only in 2D or 3D. If 2D filtering is chosen and a 3D volume is connected to the module, each slice will be filtered separately. Note also that the module stores the filter outputs in the u-dimension. Input data in the u-dimension will therefore be ignored and overwritten.
Output Fields¶
The module has two outputs. The first delivers the filtered images, which are stored in the u-dimension and which are complex valued. The second output is an XMarkerList with the directions of the filters in the chosen filter set.
Parameter Fields¶
Field Index¶
Auto Update: Bool |
B30 upi 2sqrt2: Bool |
B15 upi 2: Bool |
B30 upi 4: Bool |
B15 upi 2sqrt2: Bool |
B40 upi 4: Bool |
B15 upi 4: Bool |
Filter Dimension: Enum |
B15 upi sqrt2: Bool |
Optimization Focus: Enum |
B20 upi 2: Bool |
Update: Trigger |
B20 upi 2sqrt2: Bool |
|
B20 upi 4: Bool |
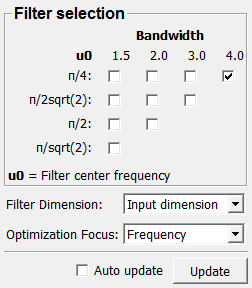
Filters are available in pre-defined pairs of center frequency and bandwith. A lower center frequency means more smoothing.
| Bandwidth B | ||||
| Center frequency ρ₀ | 1.5 | 2.0 | 3.0 | 4.0 |
| π/4 | 2.4 - 6.7 | 2.0 - 8.0 | 1.4 - 11 | 1.0 - 16 |
| π/(2√2) | 1.7 - 4.6 | 1.4 - 5.7 | 1.0 - 8 | – |
| π/2 | 1.2 - 3.4 | 1.0 - 4.0 | – | – |
| π/(√2) | 0.8 - 2.4 | – | – | – |
Visible Fields¶
B40 upi 4¶
-
name:B40_upi_4, type:Bool, default:TRUE¶ Filter with bandwidth 4 and center frequency π/4.
B30 upi 4¶
-
name:B30_upi_4, type:Bool, default:FALSE¶ Filter with bandwidth 3 and center frequency π/4.
B30 upi 2sqrt2¶
-
name:B30_upi_2sqrt2, type:Bool, default:FALSE¶ Filter with bandwidth 3 and center frequency π/(2√2).
B20 upi 4¶
-
name:B20_upi_4, type:Bool, default:FALSE¶ Filter with bandwidth 2 and center frequency π/4.
B20 upi 2sqrt2¶
-
name:B20_upi_2sqrt2, type:Bool, default:FALSE¶ Filter with bandwidth 2 and center frequency π/(2√2).
B20 upi 2¶
-
name:B20_upi_2, type:Bool, default:FALSE¶ Filter with bandwidth 2 and center frequency π/2.
B15 upi 4¶
-
name:B15_upi_4, type:Bool, default:FALSE¶ Filter with bandwidth 1.5 and center frequency π/4.
B15 upi 2sqrt2¶
-
name:B15_upi_2sqrt2, type:Bool, default:FALSE¶ Filter with bandwidth 1.5 and center frequency π/(2√2).
B15 upi 2¶
-
name:B15_upi_2, type:Bool, default:FALSE¶ Filter with bandwidth 1.5 and center frequency π/2.
B15 upi sqrt2¶
-
name:B15_upi_sqrt2, type:Bool, default:FALSE¶ Filter with bandwidth 1.5 and center frequency π/(√2).
Filter Dimension¶
-
name:filterDim, type:Enum, default:Input dimension¶ Dimension of the filter directions.
Values:
| Title | Name | Description |
|---|---|---|
| Input dimension | Input dimension | Filter dimensions will be set to the image dimensions. |
| 2d | 2D | A 2D filter set will be used. |
| 3d | 3D | A 3D filter set will be used. |