PCLPCA¶
Purpose¶
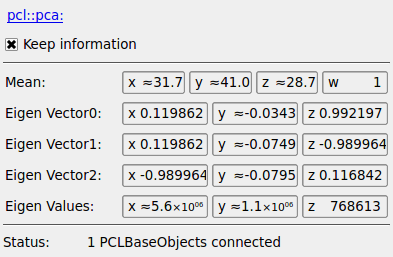
Applies the pcl::PCA filter to the input point cloud and determines mean, eigen values, and eigen vectors of the point cloud which are displayed in panel fields. The projected input point cloud is provided at the module output. See pcl::PCA for details.
Windows¶
Default Panel¶
Input Fields¶
inputPCLObject0¶
- name: inputPCLObject0, type: MLBase¶
Connect the point cloud whose properties shall be calculated and whose projection shall be passed to the output.
Output Fields¶
outputPCLObject0¶
- name: outputPCLObject0, type: MLBase¶
Provides the projection of the input point cloud according to its principle components if possible, otherwise it will contain NULL output data. Indices of source points added to the output are also provided in the output base object (the default indices for all input points).
Parameter Fields¶
Field Index¶
|
|
|
|
|
|
|
Visible Fields¶
Status¶
- name: status, type: String, persistent: no¶
see PCLModule.status
Mean¶
- name: mean, type: Vector4, persistent: no¶
This output-only field displays the mean values of the point cloud.
Eigen Vector0¶
- name: eigenVector0, type: Vector3, persistent: no¶
This output-only field displays the first eigen vector of the point cloud.
Eigen Vector1¶
- name: eigenVector1, type: Vector3, persistent: no¶
This output-only field displays the second eigen vector of the point cloud.
Eigen Vector2¶
- name: eigenVector2, type: Vector3, persistent: no¶
This output-only field displays the third eigen vector of the point cloud.
Eigen Values¶
- name: eigenValues, type: Vector3, persistent: no¶
This output-only field displays the eigen values of the point cloud.
Keep Information¶
- name: keepInformation, type: Bool, default: TRUE¶
In contrast to the other fields which display results of pcl::PCA functions this is an additional convenience field implemented in the MeVisLab wrapper module
PCLPCA. If enabled it copies all information from input points such as rgb, normals, etc. to the projected output cloud; if disabled only the projected cloud with default output point members is provided at the output.